
Transforming Industrial Robots into Precision Machine Tools
Robots fitted with an adaptive control system get real-time course corrections throughout the machining cycle.

Researchers at Fraunhofer IPA run tests using Nikon Metrology’s K-Series optical CMM and a KUKA robot.
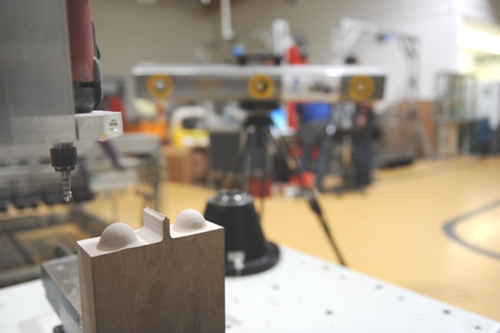
The COMET-enabled robot milling is faster than manual machining and more affordable than specialty systems, the developers say.
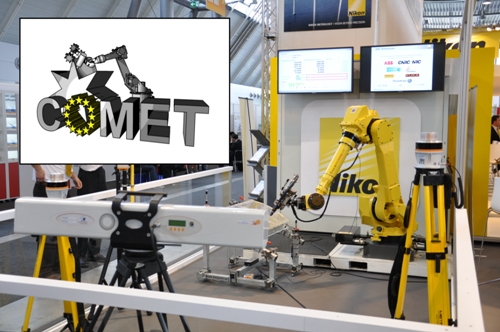
A COMET robot setup was demonstrated in the Nikon Metrology booth at the CONTROL 2011 trade show.
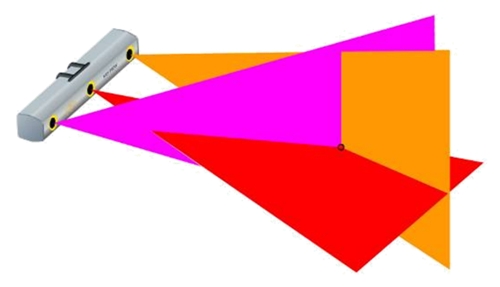
The K-Series optical CMM is able to track infra-red LEDs with 6 degrees of freedom at a sample rate up to 1000 Hz.
Share
















Hwacheon Machinery America, Inc.
Featured Content
View More

Takumi USA
Featured Content
View More

To remain competitive, high-end manufacturing companies in Europe are looking for accurate and reliable machine tools offering fast changeover, programming and setup. Industrial robot technology could provide an excellent platform for machining given its flexibility and affordability.
Related Content
-
How to Successfully Adopt Five-Axis Machining
While there are many changes to adopt when moving to five-axis, they all compliment the overall goal of better parts through less operations.
-
How to Determine the Currently Active Work Offset Number
Determining the currently active work offset number is practical when the program zero point is changing between workpieces in a production run.
-
6 Machine Shop Essentials to Stay Competitive
If you want to streamline production and be competitive in the industry, you will need far more than a standard three-axis CNC mill or two-axis CNC lathe and a few measuring tools.








